
Configurar os parâmetros de um perfil de veículo
Em um perfil de veículo você poderá configurar quais os sensores utilizados.







Procedimento

 - Acione a lista de veículos.
- Acione a lista de veículos.- 3.
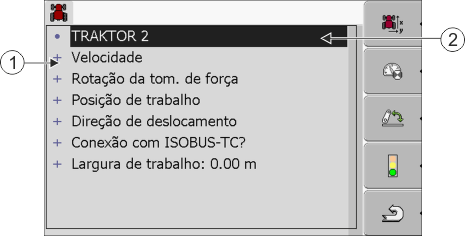
- Selecione o perfil do veículo.
- 4.
- Mude os parâmetros desejados. Você também pode mudar o nome do perfil do veículo.
Parâmetros de um perfil de veículo
São mostrados somente os parâmetros que você pode configurar com a versão de hardware do seu terminal.
Ao configurar os sensores você não apenas precisa escolher qual o sensor montado, mas também como o sensor está conectado ao terminal.
Existem duas possibilidades para isso:
- ▪
- Um sensor está ligado ao terminal através de uma interface serial (Conexão B). (por ex.: Sensor da posição operacional, todos os sensores que podem ser conectados através do conector fêmea de sinal de 7 polos). Os parâmetros para os sensores assim conectados não têm o adendo "através de CAN".
- ▪
- Um sensor está conectado ao ISOBUS e o seu sinal chega ao terminal através da interface CAN (Conexão A). Os parâmetros para estes sensores sempre têm o adendo "através de CAN".
Velocidade
Configuração do sensor de velocidade. Ele mede a velocidade.
Valores possíveis:
- ▪
- "desativado"
- Nenhum sensor mede a velocidade.
- ▪
- "Sensor de roda"
- Um sensor de roda está conectado ao terminal. O sensor de roda precisa ser calibrado.
- ▪
- "Sensor de radar"
- Um sensor de radar está conectado ao terminal. O sensor de radar precisa ser calibrado.
- ▪
- "Receptor GPS"
- A velocidade é calculada com GPS.
- ▪
- "Sensor desconh. pelo CAN"
- Um sensor de roda ou um sensor de radar está ligado através de CAN ao terminal.
- ▪
- "Sensor de radar através de CAN"
- Um sensor de radar está ligado através de CAN ao terminal.
- ▪
- "Sensor de roda através de CAN"
- Um sensor de radar está ligado através de CAN ao terminal.
Rotação da tom. de força
Configuração do sensor de rotação da tomada de força. Ele mede a rotação da tomada de força.
Valores possíveis:
- ▪
- "desativado"
- Nenhum sensor mede a rotação da tomada de força.
- ▪
- "Sensor de rotação frontal"
- Um sensor de rotação que se encontra na tomada de força frontal.
- ▪
- "Sensor de rotação traseiro"
- Um sensor de rotação que se encontra na tomada de força traseira.
- ▪
- "Imp/rotaç."
- Número de impulsos que a tomada de força transmite por rotação.
Posição de trabalho
Com este parâmetro você poderá ajustar se existe um sensor da posição operacional e como o seu sinal chega ao terminal.
Valores possíveis:
- ▪
- "desativado"
- Nenhum sensor mede a posição de trabalho.
- ▪
- "Frente através de conector B"
- Um sensor de posição de trabalho se encontra no mecanismo elevador frontal ou no dispositivo de trabalho montado no mecanismo elevador frontal. Ele está conectado ao terminal através do conector B. O sensor de posição de trabalho precisa ser configurado.
- ▪
- "Traseira através de conector B"
- Um sensor de posição de trabalho se encontra no mecanismo elevador traseiro ou no dispositivo de trabalho montado no mecanismo elevador traseiro. Ele está conectado ao terminal através do conector B. O sensor de posição de trabalho precisa ser configurado.
- ▪
- "Sensor desconh. pelo CAN"
- Existe um sensor de posição de trabalho que determina a posição de trabalho do dispositivo de trabalho. Ele está conectado ao processador ISOBUS ou a um outro terminal. O sinal chega ao terminal através de CAN.
- ▪
- "Frontal através de CAN"
- Existe um sensor de posição de trabalho que determina a posição de trabalho do dispositivo de trabalho na frente do veículo. Ele está conectado ao processador ISOBUS ou a um outro terminal. O sinal chega ao terminal através de CAN.
- ▪
- "Traseiro através de CAN"
- Existe um sensor de posição de trabalho que determina a posição de trabalho do dispositivo de trabalho na traseira do veículo. Ele está conectado ao processador ISOBUS ou a um outro terminal. O sinal chega ao terminal através de CAN.
Direção de deslocamento
Com este parâmetro você configura se o terminal pode receber um sinal de direção de deslocamento e de qual fonte este vem. Quando o sinal de direção de deslocamento está presente a aplicação TRACK-Leader pode marcar o deslocamento corretamente durante a marcha a ré.
Valores possíveis:
- ▪
- "desativado"
- Não há sensor de direção de deslocamento conectado ao terminal. Contudo, quando outro dispositivo ISOBUS envia um sinal de direção de deslocamento, este não será bloqueado.
- ▪
- "Sensor desconh. pelo CAN"
- O terminal recebe um sinal de direção de deslocamento através de CAN, cuja fonte é desconhecida.
- ▪
- "Sensor de radar através de CAN"
- Um sensor de radar com reconhecimento da direção de deslocamento está ligado ao terminal através de CAN.
- ▪
- "Sensor de roda através de CAN"
- Um sensor de roda com reconhecimento da direção de deslocamento está ligado ao terminal através de CAN.
- ▪
- "Sensor direção de desloc."
- Um sinal de direção de deslocamento está conectado na interface serial do terminal. Não funciona quando um sensor de posição de trabalho estiver conetado ao terminal.
- ▪
- "Inversão"
- Com este parâmetro o significado do sinal é invertido. Vale somente em conjunto com o parâmetro "Sensor direção de desloc.".
Conexão com ISOBUS-TC?
Através deste parâmetro você ajusta se o aplicativo Tractor-ECU deve se comunicar com o aplicativo ISOBUS-TC. Então ele transmite: Contador, posição de trabalho, posição do receptor GPS.
Somente desative este parâmetro quando o terminal for usado como terminal secundário e o receptor GPS estiver conectado a outro terminal.
Largura de trabalho
O valor será transmitido ao aplicativo ISOBUS-TC, para o cálculo da área cultivada.
O parâmetro lhe permite principalmente documentar a área cultivada em máquinas não ISOBUS, quando você trabalhar no TRACK-Leader sem um controlador conectado ISOBUS e sob uso simultâneo do aplicativo ISOBUS-TC com trabalhos ISO-XML.
Nesta situação por padrão não são transmitidos dados da máquina ao ISOBUS-TC. Para que seja possível posteriormente calcular a área cultivada no arquivo da área do campo você pode inserir a largura de trabalho aqui.
Você poderá usar essa função somente quando você também tiver um sensor de posição operacional.
Após o trabalho com uma máquina não ISOBUS, lembre-se de escolher um outro perfil de veículo na Tractor-ECU para não transmitir sempre a largura de trabalho.
Weiterführende Informationen