
Konfigurera en fordonsprofils parameter
I en fordonsprofil kan du ställa in vilka sensorer du använder.







Förfarande

 - Hämta fordonslista.
- Hämta fordonslista.- 3.
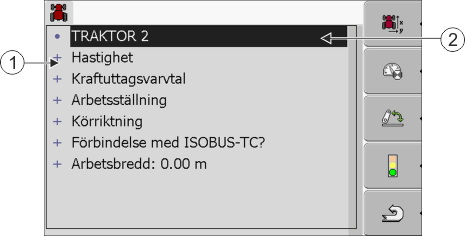
- Välj fordonsprofil.
- 4.
- Andra önskad parameter. Du kan även ändra fordonsprofilens namn.
En fordonsprofils parameter
Endast de parametrar som du kan konfigurera med din terminals hårdvaruversion visas.
När sensorer konfigureras måste du inte bara välja vilken sensor som är monterad utan också hur sensorn är ansluten till terminalen.
Det finns två sätt att göra detta:
- ▪
- En sensor är ansluten till terminalen via det seriella gränssnittet (Anslutning B). (t.ex. arbetsställningssensor, alla sensorer som kan anslutas via det 7-poliga signaluttaget). Parametrarna för de sensorer som ansluts på detta sätt har inte tillägget “via CAN“.
- ▪
- En sensor är ansluten till ISOBUS och dess signal når terminalen via CAN-gränssnittet (Anslutning A). Parametrarna för dessa sensorer har alltid tillägget “via CAN“.
Hastighet
Konfiguration av hastighetssensorn. Den mäter hastigheten.
Möjligt värde:
- ▪
- "avaktiverad"
- Ingen sensor mäter hastigheten.
- ▪
- "Hjulsensor"
- En hjulsensor är ansluten till terminalen. Hjulsensorn måste kalibreras.
- ▪
- "Radarsensor"
- En radarsensor är ansluten till terminalen. Radarsensorn måste kalibreras.
- ▪
- "GPS-mottagare"
- Hastigheten beräknas med GPS.
- ▪
- "obek. sensor via CAN"
- En hjulsensor eller en radarsensor är förbunden med terminalen via CAN.
- ▪
- "Radarsensor via CAN"
- En radarsensor är förbunden med terminalen via CAN.
- ▪
- "Hjulsensor via CAN"
- En hjulsensor är förbunden med terminalen via CAN.
Kraftuttagsvarvtal
Konfiguration av kraftuttagets varvtalssensor. Den mäter kraftuttagets varvtal.
Möjligt värde:
- ▪
- "avaktiverad"
- Ingen sensor mäter kraftuttagets varvtal.
- ▪
- "Varvtalssensor front"
- En varvtalssensor som siter på kraftuttaget i fronten.
- ▪
- "Varvtalssensor baktill"
- En varvtalssensor som siter på kraftuttaget i baktill.
- ▪
- "Impulser/varv"
- Antal impulser som kraftuttaget överför per varv.
Arbetsställning
Med den här parametern kan du ställa in om en arbetsställningssensor finns och hur dess signal når terminalen.
Möjligt värde:
- ▪
- “avaktiverad“
- Ingen sensor mäter arbetsställningen.
- ▪
- “Front via kontakt B“
- En arbetsställningssensor sitter på den främre lyftanordningen eller på redskapet som är monterat på den främre lyftanordningen. Den är ansluten till terminalen via kontakt B. Arbetsställningssensorn måste konfigureras.
- ▪
- “Bakände via kontakt B“
- En arbetsställningssensor sitter på den bakre lyftanordningen eller på redskapet som är monterat på den bakre lyftanordningen. Den är ansluten till terminalen via kontakt B. Arbetsställningssensorn måste konfigureras.
- ▪
- “obek. sensor via CAN“
- Det finns en arbetsställningssensor som bestämmer redskapets arbetsställning. Den är ansluten till en ISOBUS-jobbdator eller till en annan terminal. Signalen når terminalen via CAN.
- ▪
- “Front via CAN“
- Det finns en arbetsställningssensor som bestämmer redskapets arbetsställning på fordonsfronten. Den är ansluten till en ISOBUS-jobbdator eller till en annan terminal. Signalen når terminalen via CAN.
- ▪
- “Baktill via CAN“
- Det finns en arbetsställningssensor som bestämmer redskapets arbetsställning baktill på bordonet. Den är ansluten till en ISOBUS-jobbdator eller till en annan terminal. Signalen når terminalen via CAN.
Körriktning
Med den här parametern konfigurerar du om terminalen kan ta emot en körriktningssignal och från vilken källa den kommer. Om körriktningssignalen finns kan applikationen TRACK-Leader markera körningen korrekt när man kör bakåt.
Möjligt värde:
- ▪
- “avaktiverad“
- Ingen körriktningssensor har anslutits till terminalen. Om dock en annan ISOBUS-apparat sänder en körriktningssignal blockeras den inte.
- ▪
- “obek. sensor via CAN“
- Terminalen tar via CAN emot en körriktningssignal med okänd källa.
- ▪
- “Radarsensor via CAN“
- En radarsensor med körriktningsidentifiering är förbunden med terminalen via CAN.
- ▪
- “Hjulsensor via CAN“
- En hjulsensor med körriktningsidentifiering är förbunden med terminalen via CAN.
- ▪
- “Körriktningssensor“
- En körriktningssignal är ansluten till terminalens seriella gränssnitt. Fungerar inte om en arbetsställningssensor är ansluten till terminalen.
- ▪
- “Invertering“
- Med den här parametern inverteras signalens betydelse. Gäller endast tillsammans med parametern “Körriktningssensor“.
Förbindelse med ISOBUS-TC?
Med den här parametern ställer du in om applikationen Tractor-ECU ska kommunicera med applikationen ISOBUS-TC. Då överför den: mätare, arbetsställning, GPS mottagarens position.
Avaktivera den här parametern bara om terminalen används som extraterminal och GPS mottagaren är ansluten till en annan terminal.
Arbetsbredd
Värdet överförs till applikationen ISOBUS-TC för att beräkna den bearbetade ytan.
Parametern gör det framförallt möjligt att dokumentera den bearbetade ytan hos icke-ISOBUS-maskiner, om du arbetar i TRACK-Leader utan en ISOBUS-jobbdator och samtidigt använder appen ISOBUS-TC med ISO-XML-uppgifter.
I denna situation överförs standardmässigt inga maskindata till ISOBUS-TC. För att det senare ska vara möjligt att beräkna den bearbetade ytan i åkerskifteskartoteket, kan du ange arbetsbredden här.
Du kan bara använda den här funktionen om du även har en arbetsställningssensor.
Tänk på att du efter arbetet med en icke-ISOBUS-maskin måste välja en annan fordonsprofil i Tractor-ECU för att arbetsbredden inte alltid ska överföras.
Weiterführende Informationen