
Konfigurer parametre for en køretøjsprofil
I en køretøjsprofil kan indstilles, hvilke sensorer der skal anvendes.







Fremgangsmåde

 - Hent køretøjsliste
- Hent køretøjsliste- 3.
- Vælg køretøjsprofil.
- 4.
- Ændr ønskede parametre. Navnet af køretøjsprofilen kan også ændres.
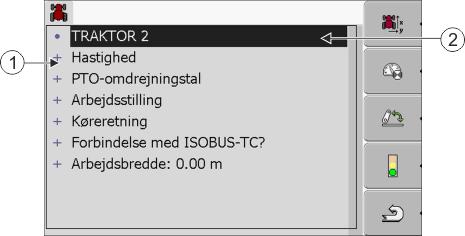
Parametre for en køretøjsprofil
Der vises kun de parametre, der kan konfigureres vha. din terminals hardwareversion.
Ved konfigurering af sensorer skal du ikke kun vælge, hvilken sensor der monteret, men også, hvordan sensoren er tilsluttet terminalen.
Her er der to muligheder:
- ▪
- En sensor er via den serielle grænseflade (tilslutning B) forbundet med terminalen. (f. eks.: Arbejdsstillingssensor, alle sensorer, der kan tilsluttes via den 7-polede signalstikdåse). Parametrene for de på denne måde tilsluttede sensorer har ikke tilføjelsen "via CAN".
- ▪
- En sensor er tilsluttet ISOBUS og dens signal når terminalen via CAN-grænsefladen (tilslutning A). Parametrene for disse sensorer har altid tilføjelsen "via CAN".
Hastighed
Konfigurering af hastighedssensor. Den måler hastigheden.
Mulige værdier:
- ▪
- "deaktiveret"
- Ingens sensor måler hastigheden.
- ▪
- "Hjulsensor"
- En hjulsensor er tilsluttet på terminalen. Hjulsensor skal kalibreres.
- ▪
- „Radarsensor“
- En radarsensor er tilsluttet på terminalen. Radarsensoren skal kalibreres
- ▪
- "GPS modtager"
- Hastigheden beregnes med GPS.
- ▪
- "ukendt sensor via CAN"
- En hjulsensor eller en radarsensor er via CAN tilsluttet på terminalen.
- ▪
- "Radarsensor via CAN"
- En radarsensor er via CAN tilsluttet på terminalen.
- ▪
- "Hjulsensor via CAN"
- En hjulsensor er via CAN tilsluttet på terminalen.
PTO-omdrejningstal
Konfigurering af PTO-akslens omdrejningstalsensor. Den måler PTO-akslens omdrejningstal.
Mulige værdier:
- ▪
- "deaktiveret"
- Ingen sensor måler PTO-akslens omdrejningstal.
- ▪
- "Omdrejningstalsensor front"
- En omdrejningstalsensor, der befinder sig på forreste PTO-aksel.
- ▪
- "Omdrejningstalsensor bag"
- En omdrejningstalsensor, der befinder sig på bageste PTO-aksel.
- ▪
- "Impulser/omdr."
- Antal impulser, som PTO-akslen overfører pr. omdrejning.
Arbejdsstilling
Med dette parameter kan det indstilles om der findes en arbejdsstillingssensor og hvordan signalet når terminalen.
Mulige værdier:
- ▪
- "deaktiveret"
- Ingen sensor måler arbejdspositionen.
- ▪
- "Foran via stik B"
- En arbejdsstillingssensor sidder på frontlæsseren eller på et arbejd redskab, der er monteret på frontlæsseren. Den er tilsluttet på terminalen via stik B. Arbejdsstillingssensoren skal konfigureres.
- ▪
- "Bag via stik B"
- En arbejdsstillingssensor sidder på baglæsseren eller på et arbejd redskab, der er monteret på baglæsseren. Den er tilsluttet på terminalen via stik B. Arbejdsstillingssensoren skal konfigureres.
- ▪
- "ukendt sensor via CAN"
- Der findes en arbejdsstillingssensor, der finder arbejdsredskabets arbejdsposition. Den er tilsluttet til en ISOBUS-jobcomputer eller en anden terminal. Signalet nor terminalen via CAN.
- ▪
- "Front via CAN"
- Der findes en arbejdsstillingssensor, der finder arbejdsredskabets arbejdsposition på køretøjets forside. Den er tilsluttet til en ISOBUS-jobcomputer eller en anden terminal. Signalet nor terminalen via CAN.
- ▪
- "Bag via CAN"
- Der findes en arbejdsstillingssensor, der finder arbejdsredskabets arbejdsposition på køretøjets bagside. Den er tilsluttet til en ISOBUS-jobcomputer eller en anden terminal. Signalet nor terminalen via CAN.
Køreretning
Vha. dette parameter konfigureres, om terminalen kan modtage et køreretningssignal og fra hvilken kilde det stammer. Hvis køreretningssignalet findes, kan applikationen TRACK-Leader markere kørslen korrekt, når der køres baglæns.
Mulige værdier:
- ▪
- "deaktiveret"
- Der er ikke tilsluttet en køreretningssensor på terminalen. Hvis et andet ISOBUS-tilsluttet redskab dog sender et køreretningssignal, blokeres dette ikke.
- ▪
- "ukendt sensor via CAN"
- Terminalen modtager via CAN et køreretningssignal, hvis kilde er ukendt.
- ▪
- "Radarsensor via CAN"
- En radarsensor med køreretningsaflæsning er via CAN tilsluttet på terminalen.
- ▪
- "Hjulsensor via CAN"
- En hjulsensor med køreretningsaflæsning er via CAN tilsluttet på terminalen.
- ▪
- "Køreretningssensor"
- Et køreretningssignal er tilsluttet på terminalens serielle grænseflade. Fungerer ikke når arbejdspositionsensoren er tilsluttet på terminalen.
- ▪
- "Invertering"
- Med dette parameter inverteres signalets betydning. Gælder kun i forbindelse med parameter "Køreretningssensor".
Forbindelse med ISOBUS-TC?
Med dette parameter indstilles, om applikationen Tractor-ECU skal kommunikere med applikationen ISOBUS-TC. Herved overføres disse data: tæller, arbejdsstilling, GPS-modtagerens position.
Deaktivér dette parameter kun, hvis terminalen benyttes som ekstraterminal, og GPS-modtageren er tilsluttet til et andet terminal.
Arbejdsbredde
Værdien overføres til applikationen ISOBUS-TC for at beregne det bearbejdede areal.
Parametret gør det først og fremmest muligt at dokumentere det bearbejdede areal ved ikke-ISOBUS-maskiner, hvis der arbejdes i TRACK-Leader uden ISOBUS-jobcomputer, og du samtidigt benytter App'en ISOBUS-TC med ISO-XML-opgaver.
I denne situation overføres som standard ingen maskindata til ISOBUS-TC. For at gøre det muligt på et senere tidspunkt at beregne det bearbejdede areal i markkartoteket, kan arbejdsbredden indlæses her.
Funktionen kan kun benyttes, hvis der findes en arbejdsstillingssensor.
Husk at vælge en anden køretøjsprofil i Tractor-ECU efter endt arbejde med en ikke-ISOBUS-maskine for ikke altid at overføre arbejdsbredden.
Weiterführende Informationen