
Configurar los parámetros de un perfil de vehículo
En un perfil de vehículo podrá establecer los sensores que se utilicen.







Procedimiento

 - Abrir la lista de vehículos.
- Abrir la lista de vehículos.- 3.
- Seleccionar el perfil de vehículo.
- 4.
- Modificar los parámetros deseados. También podrá modificar el nombre del perfil de vehículo.
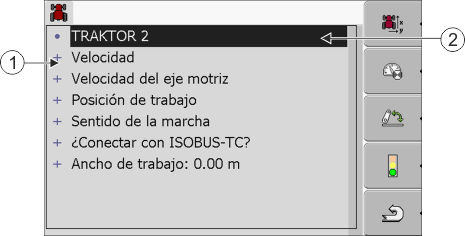
Parámetros de un perfil de vehículo
Se muestran únicamente los parámetros que se pueden configurar con su versión de hardware.
Al momento de configurar sensores, no sólo deberá seleccionar el sensor que se encuentra montado, sino también la forma en que el sensor está conectado al terminal.
Usted dispone de dos opciones:
- ▪
- Un sensor conectado al terminal a través de la interfaz serial (conexión B). (p. ej.: sensor de posición de trabajo y todos los sensores que se conectan a través del puerto de señal de 7 pines). Los parámetros de los sensores conectados bajo este modo no disponen de la opción adicional "vía CAN".
- ▪
- Un sensor conectado a ISOBUS y su señal llega al terminal a través de la interfaz CAN (conexión A). Los parámetros para estos sensores disponen siempre de la opción adicional "vía CAN".
Velocidad
Configuración de un sensor de velocidad. Mide la velocidad.
Valores posibles:
- ▪
- "Desactivado"
- Ningún sensor mide la velocidad.
- ▪
- "Sensor de la rueda"
- Hay un sensor de la rueda conectado al terminal. El sensor de la rueda debe calibrarse.
- ▪
- "Sensor radar"
- Hay un sensor radar conectado al terminal. El sensor radar debe calibrarse.
- ▪
- "Receptor GPS"
- La velocidad se calcula con el GPS.
- ▪
- "sensor desconocido vía CAN"
- Hay un sensor radar o sensor de la rueda conectado vía CAN al terminal.
- ▪
- "Sensor radar vía CAN"
- Hay un sensor radar conectado vía CAN al terminal.
- ▪
- "Sensor de la rueda vía CAN"
- Hay un sensor de la rueda conectado vía CAN al terminal.
Velocidad del eje motriz
Configuración del sensor de velocidad del eje motriz. Mide la velocidad del eje motriz.
Valores posibles:
- ▪
- "Desactivado"
- Ningún sensor mide la velocidad del eje motriz.
- ▪
- "Sens. de rot. en toma del."
- Un sensor de velocidad ubicado en el eje motriz delantero.
- ▪
- "Sens. de rot. en toma tra."
- Un sensor de velocidad ubicado en el eje motriz trasero.
- ▪
- "Impulso/rev."
- Número de impulsos que transmite el eje motriz por rotación.
Posición de trabajo
Mediante este parámetro podrá establecer la disponibilidad de un sensor de posición de trabajo y cómo llega su señal al terminal.
Valores posibles:
- ▪
- "Desactivado"
- Ningún sensor mide la posición de trabajo.
- ▪
- "Delantero vía conector B"
- Hay un sensor de posición de trabajo en el mecanismo de elevación delantero o en el implemento montado sobre el mecanismo de elevación delantero. Está conectado al terminal mediante el conector B. El sensor de posición de trabajo debe configurarse..
- ▪
- "Trasero vía conector B"
- Hay un sensor de posición de trabajo en el mecanismo de elevación trasero o en el implemento montado sobre el mecanismo de elevación trasero. Está conectado al terminal mediante el conector B. El sensor de posición de trabajo debe configurarse..
- ▪
- "sensor desconocido vía CAN"
- Hay un sensor de posición de trabajo que detecta la posición de trabajo del implemento. Está conectado a una computadora de trabajo ISOBUS u otro terminal. La señal llega al terminal vía CAN.
- ▪
- "Delantero vía CAN"
- Hay un sensor de posición de trabajo que detecta la posición de trabajo del implemento en la parte delantera del vehículo. Está conectado a una computadora de trabajo ISOBUS u otro terminal. La señal llega al terminal vía CAN.
- ▪
- "Trasero vía CAN"
- Hay un sensor de posición de trabajo que detecta la posición de trabajo del implemento en la parte trasera del vehículo. Está conectado a una computadora de trabajo ISOBUS u otro terminal. La señal llega al terminal vía CAN.
Sentido de la marcha
Este parámetro le permite configurar si el terminal permite recibir una señal del sentido de la marcha y la fuente de la que procede. Cuando se dispone de una señal del sentido de la marcha, la aplicación TRACK-Leader puede marcar correctamente el registro durante la marcha atrás.
Valores posibles:
- ▪
- "Desactivado"
- No hay ningún sensor del sentido de la marcha conectado al terminal. No obstante, si otro equipo ISOBUS envía una señal del sentido de la marcha, ésta no se bloquea.
- ▪
- "Sensor desconocido vía CAN"
- El terminal recibe vía CAN una señal del sentido de la marcha cuya fuente es desconocida.
- ▪
- "Sensor radar vía CAN"
- Hay un sensor radar con reconocimiento del sentido de la marcha conectado vía CAN al terminal.
- ▪
- "Sensor de la rueda vía CAN"
- Hay un sensor de la rueda con reconocimiento del sentido de la marcha conectado vía CAN al terminal.
- ▪
- "Sensor del sen. de la marcha"
- Hay una señal del sentido de la marcha conectada a la interfaz serial del terminal. No funciona si hay un sensor de posición de trabajo conectado al terminal.
- ▪
- "Inversión"
- Con este parámetro se invierte el significado de la señal. Válido únicamente en relación con el parámetro "Sensor del sen. de la marcha".
¿Conectar con ISOBUS-TC?
Utilice este parámetro para establecer la comunicación entre la aplicación "Tractor-ECU" y la aplicación ISOBUS-TC. Así podrá transmitir datos de: Contadores, posición de trabajo, posición del receptor GPS.
Desactive este parámetro únicamente cuando el terminal se utilice como terminal secundario y el receptor GPS esté conectado a otro terminal.
Ancho de trabajo
El valor se transfiere a la aplicación ISOBUS-TC para calcular el área procesada.
El parámetro permite sobre todas las cosas documentar el área procesada en equipos no compatibles con ISOBUS si usted trabaja en TRACK-Leader sin computadoras de trabajo ISOBUS y simultáneamente utiliza la aplicación ISOBUS-TC con tareas ISO-XML.
En estas condiciones, de forma predeterminada no se transfieren datos de la máquina a ISOBUS-TC. Por lo tanto, para que sea posible calcular el área procesada con posterioridad, ingrese aquí el ancho de trabajo.
Esta función podrá utilizarse si posee un sensor de posición de trabajo.
Recuerde que después de trabajar con un equipo no compatible con ISOBUS, deberá seleccionar otro perfil de vehículo en Tractor-ECU para no continuar transfiriendo el ancho de trabajo.
Weiterführende Informationen