Configuration du terminal dans l'application Service Configurer le compensateur d'inclinaison "GPS TILT-Module"
Configurer le compensateur d'inclinaison "GPS TILT-Module"
Configurer le compensateur d'inclinaison "GPS TILT-Module"Configurer le compensateur d'inclinaison "GPS TILT-Module"
Procédure
- þ
- Le compensateur de dévers « GPS TILT-Module » est raccordé.
- þ
- Le tracteur est sur un sol horizontal
- þ
- Le pilote de la ME-Lightbar externe est désactivé.
- 1.
- Si des appareils secondaires quelconques (p. ex. ME-Lightbar) sont raccordés au câble entre le terminal et le compensateur de dévers n, ils doivent être débranchés. Le compensateur de dévers doit être branché directement sur le terminal. Après configuration du compensateur de dévers, vous devez rebrancher ces appareils secondaires.
- 2.
- Mesurer la distance entre le récepteur GPS et la surface du sol.
- 3.
- Allumer le terminal.


- 5.
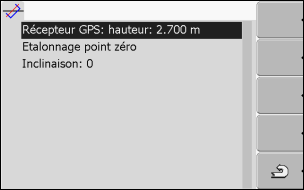
- Préciser la distance entre le récepteur GPS et la surface du sol dans la ligne "Récepteur GPS: hauteur".
- 6.
- placer le tracteur sur un terrain connu pour être plat.
- 7.
- Cliquer sur la ligne "Étalonnage point zéro".
- ⇨
- La position du compensateur de dévers sur un sol horizontal est étalonnée.
- ⇨
- Après calibration, l’angle 0 s’affiche dans la ligne « Inclinaison ». L’angle affiché varie en fonction de l’inclinaison du tracteur.
- 8.
- Raccordez de nouveau tous les appareils secondaires que vous aviez débranchés.